层级时间轮的 Golang 实现
一、引言
最近在工作中负责制定重构计划,需要将部分业务代码从 Python 迁移到 Golang。其中一些功能涉及到 Celery 延时任务,所以一直在思考 Golang 中处理延时任务的有效方案。
其实在软件系统中,“在一段时间后执行一个任务” 的需求比比皆是。比如:
- 客户端发起 HTTP 请求后,如果在指定时间内没有收到服务器的响应,则自动断开连接。
为了实现上述功能,通常我们会使用定时器 Timer:
- 客户端发起请求后,立即创建(启动)一个 Timer:到期间隔为 d,到期后执行 “断开连接” 的操作。
- 如果到期间隔 d 以内收到了服务器的响应,客户端就删除(停止)这个 Timer。
- 如果一直没有收到响应,则 Timer 最终会到期,然后执行 “断开连接” 的操作。
Golang 内置的 Timer 是采用最小堆来实现的,创建和删除的时间复杂度都为 O(log n)。现代的 Web 服务动辄管理 100w+ 的连接,每个连接都会有很多超时任务(比如发送超时、心跳检测等),如果每个超时任务都对应一个 Timer,性能会比较低下。
论文 Hashed and Hierarchical Timing Wheels 提出了一种用于实现 Timer 的高效数据结构:时间轮。采用时间轮实现的 Timer,创建和删除的时间复杂度为 O(1)。
常见的时间轮实现有两种:
- 简单时间轮(Simple Timing Wheel)—— 比如 Netty4 的 HashedWheelTimer。
- 层级时间轮(Hierarchical Timing Wheels)—— 比如 Kafka 的 Purgatory。
参考 Kafka 的层级时间轮实现(基于 Java/Scala 语言),我依葫芦画瓢实现了一个 Golang 版本的层级时间轮,实现源码作为个人项目放到了 GitHub。
下面我们来看看简单时间轮、层级时间轮、Kafka 的层级时间轮变体的实现原理,以及 Golang 实现中的一些要点。
二、简单时间轮
一个 简单时间轮 就是一个循环列表,列表中的每一格包含一个定时任务列表(双向链表)。一个时间单位为 u、大小为 n 的简单时间轮,可以包含的定时任务的最大到期间隔为 n*u。
以 u 为 1ms、n 为 3 的简单时间轮为例,可以包含的定时任务的最大到期间隔为 3ms。
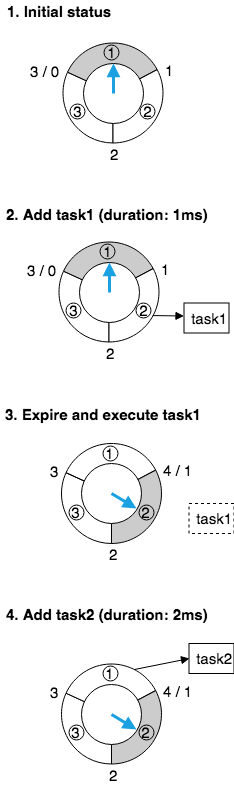
如上图所示,该简单时间轮的运行原理如下:
- 初始时,假设当前时间(蓝色箭头)指向第 1 格(此时:到期间隔为 [0ms, 1ms) 的定时任务放第 1 格,[1ms, 2ms) 的放第 2 格,[2ms, 3ms) 的放第 3 格)。
- 此时我们创建一个到期间隔为 1ms 的定时任务 task1,按规则该任务会被插入到第 2 格。
- 随着时间的流逝,过了 1ms 后当前时间指向第 2 格,这一格包含的定时任务 task1 会被删除并执行。
- 当前时间指向第 2 格(此时:到期间隔为 [0ms, 1ms) 的定时任务放第 2 格,[1ms, 2ms) 的放第 3 格,[2ms, 3ms) 的放第 1 格),我们继续创建一个到期间隔为 2ms 的定时任务 task2,按规则该任务被插入到第 1 格。
简单时间轮的优点是实现简单,缺点是:
- 一旦选定 n,就不能包含到期间隔超过 n*u 的定时任务。
- 如果定时任务的到期时间跨度较大,就会选择较大的 n,在定时任务较少时会造成很大的空间浪费。
有一些简单时间轮的 变体实现,它们通过在定时任务中增加记录 round 轮次信息,可以有效弥补上述两个缺点。同样以上面 u 为 1ms、n 为 3 的简单时间轮为例,初始时间指向第 1 格;此时如果要创建到期时间为 4ms 的定时任务,可以在该任务中设置 round 为 1(4/3 取整),剩余到期时间用 4ms 减去 round*3ms 等于 1ms,因此放到第 2 格;等到当前时间指向第 2 格时,判断任务中的 round 大于 0,所以不会删除并执行该任务,而是对其 round 减一(于是 round 变为 0);等到再过 3ms 后,当前时间再次指向第 2 格,判断任务中的 round 为 0,进而删除并执行该任务。
然而,这些变体实现因为只使用了一个时间轮,所以仍然存在一个缺点:处理每一格的定时任务列表的时间复杂度是 O(n),如果定时任务数量很大,分摊到每一格的定时任务列表就会很长,这样的处理性能显然是让人无法接受的。
三、层级时间轮
层级时间轮 通过使用多个时间轮,并且对每个时间轮采用不同的 u,可以有效地解决简单时间轮及其变体实现的问题。
参考 Kafka 的 Purgatory 中的层级时间轮实现:
- 每一层时间轮的大小都固定为 n,第一层时间轮的时间单位为 u,那么第二层时间轮(我们称之为第一层时间轮的溢出时间轮 Overflow Wheel)的时间单位就为 n*u,以此类推。
- 除了第一层时间轮是固定创建的,其他层的时间轮(均为溢出时间轮)都是按需创建的。
- 原先插入到高层时间轮(溢出时间轮)的定时任务,随着时间的流逝,会被降级重新插入到低层时间轮中。
以 u 为 1ms、n 为 3 的层级时间轮为例,第一层时间轮的时间单位为 1ms、大小为 3,第二层时间轮的时间单位为 3ms、大小为 3,以此类推。
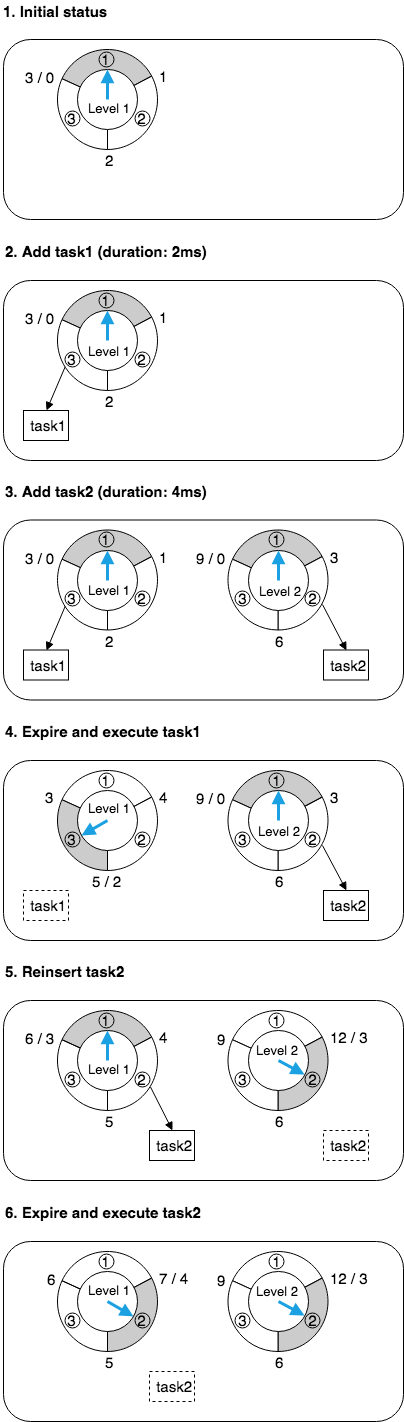
如上图所示,该层级时间轮的运行原理如下:
- 初始时,只有第一层(Level 1)时间轮,假设当前时间(蓝色箭头)指向第 1 格(此时:到期间隔为 [0ms, 1ms) 的定时任务放第 1 格,[1ms, 2ms) 的放第 2 格,[2ms, 3ms) 的放第 3 格)。
- 此时我们创建一个到期间隔为 2ms 的定时任务 task1,按规则该任务会被插入到第一层时间轮的第 3 格。
- 同一时刻,我们再次创建一个到期间隔为 4ms 的定时任务 task2,因为到期间隔超过了第一层时间轮的间隔范围,所以会创建第二层(Level 2)时间轮;第二层时间轮中的当前时间(蓝色箭头)也指向第 1 格,按规则该任务会被插入到第二层时间轮的第 2 格。
- 随着时间的流逝,过了 2ms 后,第一层时间轮中的当前时间指向第 3 格,这一格包含的任务 task1 会被删除并执行;此时,第二层时间轮的当前时间没有变化,依然指向第 1 格。
- 随着时间的流逝,又过了 1ms 后,第一层时间轮中的当期时间指向第 1 格,这一格中没有任务;此时,第二层当前时间指向第 2 格,这一格包含的任务 task2 会被删除并重新插入时间轮,因为剩余到期时间为 1ms,所以 task2 会被插入到第一层时间轮的第 2 格。
- 随着时间的流逝,又过了 1ms 后,第一层时间轮中的当前时间指向第 2 格,这一格包含的定时任务 task2 会被删除并执行;此时,第二层时间轮的当前时间没有变化,依然指向第 2 格。
四、Kafka 的变体实现
在具体实现层面(参考 Kafka Timer 实现源码),Kafka 的层级时间轮与上面描述的原理有一些差别。
1. 时间轮表示
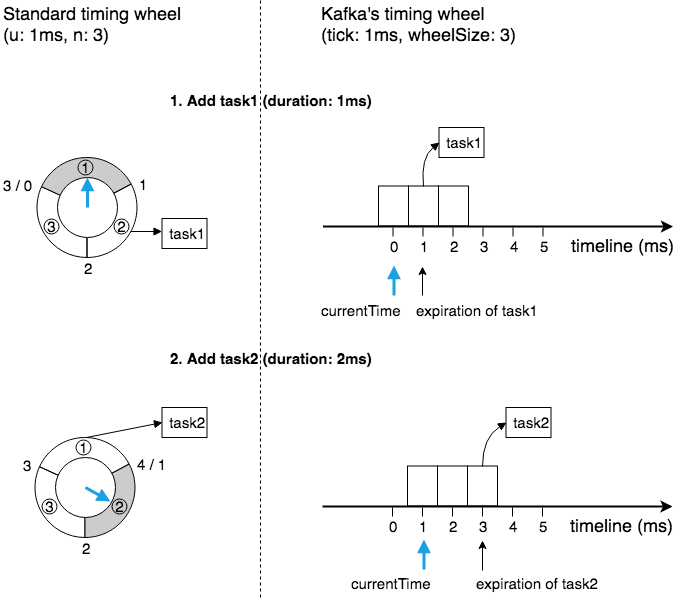
如上图所示,在时间轮的表示上面:
- 使用大小为 wheelSize 的数组来表示一层时间轮,其中每一格是一个 bucket,每个 bucket 的时间单位为 tick。
- 这个时间轮数组并没有模拟循环列表的行为(如图左所示),而是模拟了哈希表的行为。具体而言(如图右所示),这个时间轮数组会随着 currentTime 的流逝而移动,也就是说 currentTime 永远是指向第一个 bucket 的,每个落到该时间轮的定时任务,都会根据哈希函数 (expiration/tick)%wheelSize 散列到对应的 bucket 中(参考 源码)。
2. 时钟驱动方式
常规的时间轮实现中,会在一个线程中每隔一个时间单位 tick 就醒来一次,并驱动时钟走向下一格,然后检查这一格中是否包含定时任务。如果时间单位 tick 很小(比如 Kafka 中 tick 为 1ms)并且(在最低层时间轮的)定时任务很少,那么这种驱动方式将会非常低效。
Kafka 的层级时间轮实现中,利用了 Java 内置的 DelayQueue 结构,将每一层时间轮中所有 “包含有定时任务的 bucket” 都加入到同一个 DelayQueue 中(参考 源码),然后 等到有 bucket 到期后再驱动时钟往前走(参考 源码),并逐个处理该 bucket 中的定时任务(参考 源码)。
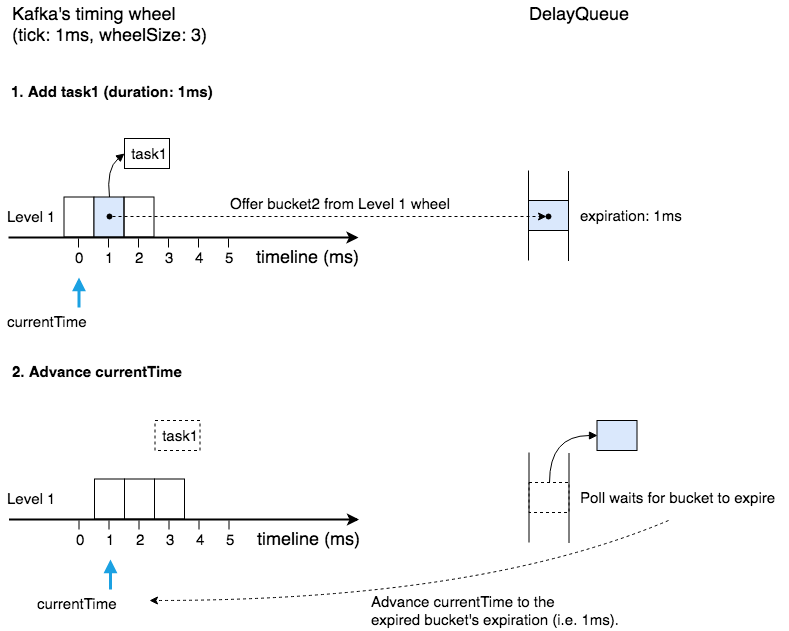
如上图所示:
- 往层级时间轮中添加一个定时任务 task1 后,会将该任务所属的 bucket2 的到期时间设置为 task1 的到期时间 expiration(= 当前时间 currentTime + 定时任务到期间隔 duration),并将这个 bucket2 添加(Offer)到 DelayQueue 中。
- DelayQueue(内部有一个线程)会等待 “到期时间最早(earliest)的 bucket” 到期,图中等到的是排在队首的 bucket2,于是经由 poll 返回并删除这个 bucket2;随后,时间轮会将当前时间 currentTime 往前移动到 bucket2 的 expiration 所指向的时间(图中是 1ms 所在的位置);最后,bucket2 中包含的 task1 会被删除并执行。
上述 Kafka 层级时间轮的驱动方式是非常高效的。虽然 DelayQueue 中 offer(添加)和 poll(获取并删除)操作的时间复杂度为 O(log n),但是相比定时任务的个数而言,bucket 的个数其实是非常小的(也就是 O(log n) 中的 n 很小),因此性能也是没有问题的。
五、Golang 实现要点
timingwheel 中的 Golang 实现,基本上都是参考 Kafka 的层级时间轮的原理来实现的。
因为 Golang 中没有现成的 DelayQueue 结构,所以自己实现了一个 DelayQueue,其中:
- PriorityQueue —— 从 NSQ 借用过来的 优先级队列(基于最小堆实现)。
- DelayQueue —— Offer(添加 bucket)和 Poll(获取并删除 bucket)的运作方式,跟 Golang Timer 运行时中 addtimerLocked 和 timerproc 的运作方式如出一辙,因此参考了其中的实现方式(参考 原理介绍)。